







The Pegasus unmanned air vehicle was initially developed under private funding by the integrated systems sector of Northrop Grumman at El Segundo in California. Pegasus received its X-47A designation in June 2001.
Recommended White Papers
Recommended Buyers Guides
The X-47A provided a proof of concept for the Defense Advanced Research Projects Agency (DARPA) and the US Navy UCAV-N programme, and is spiral 0 in the spiral development programme targeted towards US Navy requirements. A similar programme managed by DARPA and the US Air Force covered the development of the Boeing X-45 targeted towards US Air Force requirement.
DARPA announced the joint unmanned combat air vehicle (J-UCAS) programme to meet both the air force and naval requirements.
Pegasus X-47A and X-47B UCAV development
US Navy unmanned combat air vehicle with a stealthy planform design.”
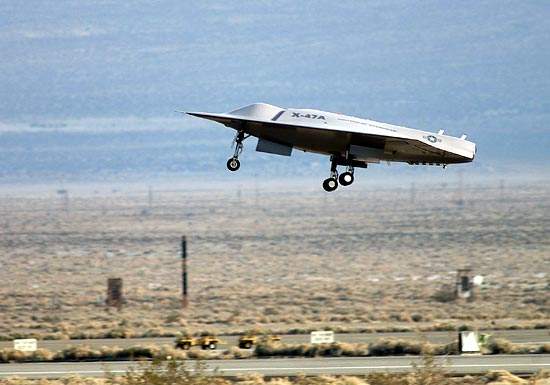
The roll out ceremony of the proof-of-concept X-47A vehicle was held in July 2001 and the first flight was successfully completed in February 2003.
The X-47B is a larger naval variant of the X-47A. In August 2004, DARPA awarded the contract to Northrop Grumman for three X-47B demonstrator UCAVs and an operational assessment phase to last from 2007–2009. Construction of the X-47B began in June 2005.
In October 2005, DARPA handed the programme over to a joint USN and USAF office. The spiral 1 development phase under the J-UCAS programme included the design of the improved demonstrator air vehicles, X-45C and the X-47B.
In February 2006, the J-UCAS programme was cancelled by the US Department of Defense and the USAF and USN were to follow separate UAV programmes. Northrop Grumman halted work on the X-47B due to the termination of J-UCAS programme.
Unmanned combat air system demonstrator (UCAS-D) programme
In August 2007, Northrop Grumman was selected by the US Navy for the unmanned combat air system demonstrator (UCAS-D) with a version of the X-47B with Pratt & Whitney F100-PW-229 engine. The programme is to demonstrate the suitability of an autonomous UAV for aircraft carrier operations and identify critical technologies.
Two X-47B demonstrator air vehicles are being built under the UCAS-D programme. The first demonstrator air vehicle (AV-1) was rolled out in December 2008 and was completed in October 2009. Its structural proof testing was carried out in July 2009.
AV-1 was moved to Edwards Air Force Base (AFB) in July 2010. The second demonstrator air vehicle (AV-2) completed its structural proof testing in January 2011. It was transferred to Edwards AFB in March 2011.
The first flight testing of AV-1 was scheduled to begin in late 2009, but the programme fell behind schedule. It took off on its first flight test in February 2011 and performed carrier landings in July 2011.
The first carrier launches and recoveries of the X-47B are planned for demonstration in 2013 with autonomous aerial refuelling in 2014.
X-47 Pegasus air vehicle
The airframe is a stealthy planform design. It is diamond-kite shaped with a 55° backward sweep on the leading edge and a 35° forward sweep on the trailing edge. The X-47A has a wingspan of 8.47m and is 8.5m long.
Scaled Composites Inc of Mohave, California, were contracted to manufacture the all-carbon composite airframe. The air vehicle has no tail or vertical fin. Instead of a traditional rudder for yaw control, the upper and lower surfaces are each fitted with two sections of moving surfaces. A large elevon is clearly visible at the mid-section of each trailing edge.
The vehicle is robustly built for carrier take-off and landings and uses a conventional wheeled take-off and landing with an arrestor hook. The retractable tricycle-type landing gear consists of a single nose wheel, twin wheel main landing gear and a fully retractable arrestor hook. Smiths Aerospace is providing the landing gear for the X-47B.
Pegasus avionics
The Pegasus is equipped with an avionics suite supplied by BAE Systems Platform Solutions of Johnson City, New York. The avionics and vehicle management computer performs flight control processing, autopilot control, engine control processing, mission command and control, navigation and other functions.
The computer features an embedded, open-architecture CsLEOS real-time operating system which uses ‘brick-wall’ time and memory partitioning to allow multiple applications to run on the same system without interfering with each other.
The system also provides multiple scheduling modes, allowing users to switch between different schedule profiles in real time.
The navigation systems include the US Navy shipboard relative global positioning system (SRGPS) automatic landing system.
Turbofan engines
The Pegasus is powered by a single Pratt & Whitney Canada JT15D-5C turbofan engine rated at 14,19kN. The air vehicle carries 472kg of fuel but has a maximum capacity of 717kg of fuel for long-range operations or for increased loiter times.
The Global Unmanned Aerial Vehicles (UAV) Market 2011-2021
This project forms part of our recent analysis and forecasts of the global unmanned aerial vehicles (UAV) market available from our business information platform Strategic Defence Intelligence. For more information click here or contact us: EMEA: +44 20 7936 6783; Americas: +1 415 439 4914; Asia Pacific: +61 2 9947 9709 or via email.



