








The UK MoD announced that the contract for the Taranis unmanned air vehicle demonstrator programme had been awarded to a team led by BAE Systems, in December 2006.
Recommended White Papers
Recommended Buyers Guides
The industrial participation in the £185m joint programme is managed at BAE Systems in Warton, Lancashire, as prime contractor and industrial team leader.
A fully developed Taranis air vehicle is capable of delivering weapons to a battlefield in another continent with a high level of autonomy. In July 2010, the MoD unveiled the fully-developed Taranis prototype. The high speed taxi tests of the unmanned combat air vehicle (UCAV) were conducted in July 2013.
The first test flight of the Taranis unmanned combat demonstrator aircraft was conducted in August 2013. The aircraft surpassed the take-off, rotation, climb-out and landing requirements during the 15-minute maiden flight which was later followed by other flights of approximately an hour’s duration at diverse altitudes and speeds.
Taranis unmanned combat air vehicle
The project was directed towards designing and flying an unmanned aircraft, gathering the evidence needed to inform decisions about a future long-range offensive aircraft and evaluating UAVs’ contribution to the RAF’s future mix of aircraft.
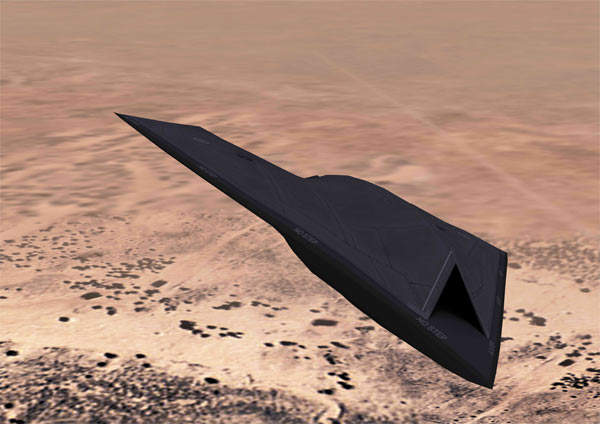
Taranis is stealthy, fast, able to carry out test deployment of a range of munitions over a number of targets, and to defend itself against manned and other unmanned enemy aircraft.
Assembly of the first demonstrator began in September 2007. Ground testing of Taranis started in 2010 in Warton, Lancashire. Unmanned pilot training, radar cross section measurements, ground station system integration and taxi trials on the demonstrator were performed in April 2013. There are no scheduled weapons releases from the demonstrator vehicle but emulated weapons release will be trialled.
Strategic unmanned air vehicle (experiment) SUAV(E) programme
Taranis represents the first UK MoD-funded UCAV programme. BAE has funded its own research into UAV and UCAV technologies and demonstrators for ten years. The UK MoD did not join the European multi-national nEUROn UCAV programme, instead focussing on the UK’s strategic unmanned air vehicle (experiment) SUAV(E) programme that was announced in March 2005.
The aim of the SUAV(E) programme is to assemble evidence to inform a decision on UK forces future use of UAVs and procurement options. In December 2005 the UK’s Defence Industry Strategy White Paper briefly explained that the UK was in favour of targeted investment in UCAV technology demonstrator programmes.
Industrial participation
The industrial team, to be led by BAE Systems – the platform developer, includes Rolls-Royce, QinetiQ and GE Aviation Systems (formerly Smiths Aerospace).
As the prime contractor, BAE Systems is responsible for the overall programme and also for many of the technologies including stealth and low observability, systems integration and system control infrastructure.
BAE Systems and QinetiQ are working closely on all aspects relating to the autonomy of the system. GE Aviation Systems is responsible for providing the fuel gauging systems and the complete electrical power system for the air vehicle. Rolls-Royce is responsible for the propulsion system and installation in the air vehicle. BAE Systems Australia is tasked with developing and supplying the flight control computing.
The Integrated Systems Technologies (Insyte) subsidiary of BAE Systems, is providing C4ISTAR (computers, command, control, communications, intelligence, surveillance, target acquisition and reconnaissance) support. Prior to and separately from the Taranis contract, Insyte has been working in partnership with QinetiQ and UK MoD to understand capability enhancements for more efficient prosecution of emerging targets (POET) and examining network-enabled capability and C4ISTAR architectures for future air systems.
Taranis air vehicle
The technology demonstrator vehicle (TDV), the Taranis air vehicle is one of the world’s largest unmanned air vehicles and is approximately the same size as the BAE Systems Hawk advanced jet trainer which is 11.35m long, 3.98m high and has a wingspan of 9.94m.
On the same basis, the weight of the Taranis is approximately 8t. For comparison the empty weight and take-off weight of the Hawk are 4.45t and 9.1t.
The Taranis air vehicle has a delta-wing shape and tricycle-type landing gear. A computer-generated video shows the system taking off from a paved runway. The Taranis air vehicle is similar in shape, if not in scale, to BAE’s Raven delta-wing demonstrator unmanned air vehicle.
Claverham Ltd (formerly Fairey Hydraulics Ltd) has been contracted to provide the Primary Flight Control Actuation System for Taranis. Claverham Ltd is following a low-risk design strategy of scaling third-generation direct-drive valve systems (DDV) developed as part of the joint strike fighter programme.
Dunlop Aerospace Braking Systems is providing the wheels, brakes and brake control systems for the air vehicle.
Engine
Rolls-Royce is responsible for the development of the Taranis’s engine. The Taranis could be powered by the Adour 951 engine which has a target maintenance interval of 4,000 hours. The Adour 951 is a derivative of the Adour 871, and provides a thrust of 6,480lb which represents an 8% increase in thrust compared to the Adour 871.
The improvements in the Adour 951 engine include the use of optimised materials in the hot section for higher durability, a new fan design to provide higher thrust and digital rather than hydrodynamic control. Full authority digital engine control (FADEC) will provide engine surge protection, and automated control and recovery.
Deliveries of the Adour 951 began to launch customer, South Africa, in 2005 and the engine has also been ordered by Bahrain and the UK.
Ground station
The ground control infrastructure provides planning for and command of the air vehicle’s mission and control of the air vehicle specifically during taxi, launch and recovery. In addition the ground control provides connectivity for mission data and imagery to and from the wider battlespace information systems.
Insyte is responsible for the delivery of force-level mission management, mission planning and control, and payload control including imagery analysis and exploitation. Insyte also has responsibility for systems integration and clearance of the ground control infrastructure with the air vehicle control element of the system, provided by BAE Systems IAS in Australia.
Mission systems
The design of the Taranis UAV onboard mission systems will include advanced and highly flexible open systems architecture based on architecture developed by BAE Systems for the Hawk advanced jet trainer and Typhoon aircraft.
An important advanced technology to be integrated into the Taranis system will be the systems intelligence which provides the high level of autonomy and improved operational effectiveness. For airborne surveillance and reconnaissance missions, BAE Systems’s image collection and exploitation (ICE) system allows autonomous collection and distribution of high-quality imagery with very low bandwidth allocation.
The integration of the image collection and exploitation system with the vehicle control systems provides autonomy and flexibility and allows the generation of a single integrated surface picture across a network of sensors. BAE Systems will consider the application of ICE technology in the Taranis programme.
Risk-reduction programmes
The Taranis programme will use systems and technologies developed over the last ten years in risk reduction programmes including the Replica programme (in which a full-scale model of an armed radar-signature-controlled aircraft was manufactured), jointly funded by BAE Systems and MoD, and the MoD-funded Nightjar programme (on the design, aerodynamics, manufacturing and in-service performance limits of UAVs) and on UAV demonstrators produced by BAE Systems.
BAE Systems has invested heavily in private funding of a series of UAV programmes such as Kestrel, Corax, Raven and HERTI.
Kestrel UAV
The Kestrel UAV has blended-wing design and was developed by BAE Systems in collaboration with Cranfield University. The vehicle was ready to fly within seven months of the project start. Kestrel achieved the first CAA-approved, jet-powered unmanned aircraft in UK airspace under civil registration in March 2003.
Raven delta-wing UAV
The Raven delta-wing UAV demonstrator programme was carried out at the BAE Systems Advanced Technology Demonstration Centre at Warton during 2003/4 and successfully demonstrated some of the key technologies required for the Taranis programme.
In ten months the Raven project was taken from concept to first flight. The Raven programme was targeted at demonstrating flight control and autonomous system functionality and also rapid prototyping development and manufacturing techniques and capabilities.
Raven, which first flew in 2003, is a highly aerodynamically unstable jet-powered autonomous vehicle and may be the only finless UAV outside the USA.
The Raven UAV is fully autonomous from take-off to landing and is configured to provide very high agility. Raven used the advanced flight control systems developed by BAE for novel air vehicle shapes to create highly survivable, strategic UAV systems.
Corax ISTAR system demonstrator
The Corax programme proved that a modular design UAV was successful, the Corax air vehicle being a Raven body with wings. Corax is a multi-role ISTAR system demonstrator and was completed in 2005.
The Corax system drew on the advanced flight control system from the Raven programme and was aimed at the manufacture of a high survivability strategic UAV system. Corax uses the same centre body design as Raven and composite wings manufactured at BAE Systems in Samlesbury, Lancashire.
HERTI UAV programme
HERTI (high-endurance rapid technology insertion) UAV is a fully autonomous multi-mission UAV optimised for surveillance and point reconnaissance.
The HERTI 1-D concept demonstrator was the first of the HERTI systems and it used the common systems, the power plant and the ground station from the CORAX and RAVEN UAV programmes. HERTI-D used the airframe designed by Mr Janaowski of J&AS Aero Design.
The HERTI-D progressed from conception phase in June 2004 to achieving its first flight in Australia in December 2004. Carrying the BAE Systems ICE payload, HERTI-D carried out extended missions including fully autonomous flight, demonstrations of loiter capability, and complex flight profiles at altitudes up to 5,000ft.
HERTI-1A is a significantly larger version of the HERTI-1D and has larger payload capacity and high endurance. The HERTI-1A vehicle G-8-008 achieved the first fully autonomous mission of an unmanned aircraft in UK airspace on 18 August 2005.
This first flight included a take-off from Campbeltown airport in Scotland, the flight of a fully autonomous mission over Machrihanish bay and return to Campbeltown Airport with a fully autonomous landing. The autonomous flight controlled by a mission system commander, was conducted in close collaboration with the Civil Aviation Authority.
In September 2006, it was announced that BAE Systems would be working with the RAF on a two-year programme (project Morrigan) to integrate the HERTI UAV into UK military exercises, to inform future development of UAV capabilities.
As part of the project the RAF deployed a HERTI system in Afghanistan in summer 2007.
The first two production HERTI UAVs were delivered in November 2007 and February 2008.
In November and December 2006, HERTI successfully completed fully autonomous flight trials at the Woomera range followed by a period of data analysis concluded in January. The ICE payload successfully undertook autonomous target searches.