



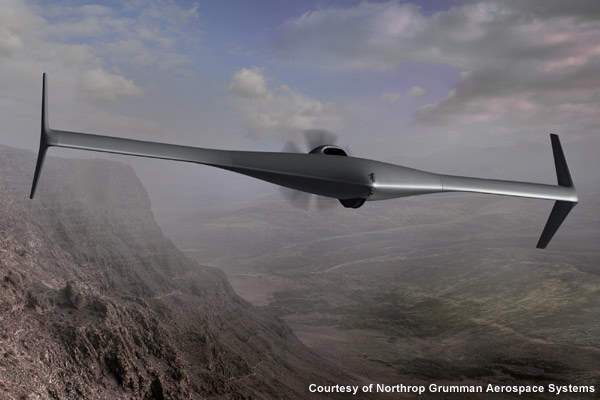

The Bat, formerly known as the KillerBee, is a low altitude and long endurance unmanned air vehicle (UAV) system. It was designed and developed jointly by Northrop Grumman and Swift Engineering to meet the requirements of the US Air Force, Marine Corps, Navy and the Department of Homeland Security. The Bat can perform intelligence, surveillance and reconnaissance (ISR) operations over a large area. Its huge capacity provides space for commercial off-the-shelf (COTS) payloads and systems.
Recommended Buyers Guides
The Bat aircraft, launched from an AAI Shadow unmanned aerial system (UAS) launcher, does not require a runway and can be retrieved through nets. The UAV captures real-time intelligence data (audio and video) across large distances and transmits it to the ground control station (GCS) through a satellite communication data link.
The UAV completed its maiden flight on 25 February 2010. It can undertake surveillance and reconnaissance operations flying at a maximum speed of 201km/h. The Bat can also be used for commercial applications for private security, traffic monitoring, agriculture, forestry, storms, pipelines, power lines and fisheries.
Bat UAV variants
The Bat has two variants – Bat-10 and Bat-12. Bat-10 is powered by turbo piston diesel engine and has a 3m wingspan. Bat-12 has a wingspan of 3.65m. It is equipped with a Hirth engine and features a five-blade propeller with a low acoustic signature. The variant took its first flight test in January 2010.
Bat unmanned air vehicle design
The UAV is designed to be launched and recovered from land, sea and air using primary net or optional landing gear. The blended wing design of the aircraft merges with the fuselage into a single airfoil and reduces aerodynamic drag, and enhances fuel economy and endurance.
The airfoil is constructed with carbon and fibreglass composites providing structural efficiency and thickness, thereby, making it less sensitive to damage or loss. The net hooks in the nose allow the aircraft to land in a conventional retrieval net.
Bat UAV development
Northrop Grumman partnered with Swift Engineering in 2005 to design and develop KillerBee UAV (now known as Bat) for the US Navy and Marine Corps as part of the small tactical unmanned aircraft system (STUAS) / Tier II programme. Swift Engineering began manufacturing the KillerBee UAV, GCS, launcher, and recovery system alone after the partnership collapsed in early 2007.
In April 2009, Northrop Grumman acquired the KillerBee from Swift Engineering and renamed it ‘Bat’. Northrop Grumman collaborated with Raytheon in May 2009 to offer the KillerBee for STUAS and other programmes.
Bat aircraft navigation
The UAV can be controlled either manually from the ground control station (GCS) or through the autonomous mode. It will be fully equipped with an automatic launch and recovery (ALR) system, which aids in automatic safe landing during communication failure with the GCS.
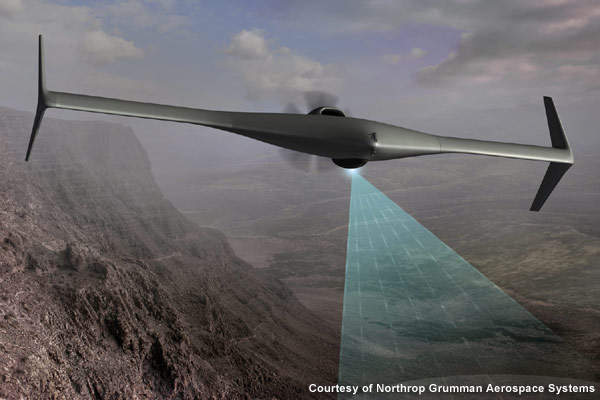
Electro-optic, infrared sensors
The UAV is equipped with electro-optic (EO), infrared (IR) sensors, laser range finders, laser designators, still image and real-time video cameras. The EO sensor converts light rays into electronic signals for capturing images, real-time data and videos. The laser designator installed in the Bat will be used to target the enemy’s battlefield.
Bat UAV radars
The Bat is fitted with a synthetic aperture radar (SAR), moving target indicator (MTI), signal intelligence (SIGINT) and communication intelligence (COMINT), chemical and biological detection systems and flare dispensers.
Long-endurance UAV performance
The maximum speed of the Bat is 201km/h. Its service ceiling is 4,600m. The maximum endurance of the UAV is 15 hours, while its maximum take-off weight is 19.5kg.
Ground control station (GCS)
The real-time data captured by the UAV will be processed, retrieved and stored at the GCS. The GCS, manufactured by Northrop Grumman and Swift Engineering, can control up to two UAVs at a time.
The UAS is a set of two major assemblies, launcher and GCS – both transportable on the MV-22 – HUMVEE, helicopters and cargo aircraft. The launcher can be controlled and monitored by crew residing in the GCS using the defined software.
The state-of-the-art COTS technology is implemented at the GCS to convert live and stored images, imagery and spatial information including EO, SAR, MTI maps and SIGINT into actionable intelligence.